Keď sa koncom 19. storočia začali používať bicykle, museli ste si na ne vybaviť vodičský preukaz. Bola zostavená renomovaná komisia, ktorá vyučovala teóriu a prax jazdy a vydávala evidenčné čísla. Nikomu nebolo dovolené odovzdať vozidlo. Dôvodom opatrnosti bolo zvýšené riziko jazdy na dvojkolesovom vozidle. Bežný človek nechápe, prečo sa bicykel pri pohybe neprevráti. Na túto jednoduchú otázku prekvapivo nedokážu jednoznačne odpovedať ani fyzici, ktorí skúmajú fungovanie kolových systémov.
Teoretická analýza a fyzikálne experimenty ukázali, že gyroskopický moment a kladný zdvih vidlice nie sú dostatočné pre stabilitu bicykla. Okrem riadeného riadenia je k dispozícii aj automatické riadenie. Navyše, rozloženie záťaže zohráva kľúčovú úlohu pri udržiavaní rovnováhy. Ako vidíte, vzhľadom na pomerne dlhý život motocykla sa stále objavujú a zdokonaľujú nové vlastnosti.
Prečo sa bicykel pri jazde neprevráti
Na vysvetlenie jednoduchej úlohy sa často používa metafora: „je to také jednoduché ako jazda na bicykli“. V skutočnosti je potrebné zabrániť pádu dopravných prostriedkov. Spočiatku sa myslelo, že bicykel jazdí na úkor jazdca. Osoba vycíti sklon konštrukcie, mierne natočí riadidlá v smere pádu a vyrovná jazdu. Pri vysokej rýchlosti však bicykel získa stabilitu a nespadne, ani keď sa uvoľnia riadidlá. Neskôr sa objavili hypotézy o gyroskopickom pôsobení predného kolesa a riadení. Ukázalo sa však, že nevedené bicykle a robotickí cyklisti tiež nepadajú.
Hlavná otázka o príčine stability znie: čo spôsobuje vhodný vzťah medzi náklonom a otáčaním? Existuje všeobecne uznávaný názor, že tento efekt vzniká ako dôsledok rotačného (gyroskopického) krútiaceho momentu a kladného dosahu vidlice. Stabilizačný účinok predného kolesa a odstredivá sila spôsobená vychýlením pohybu z priamej dráhy sú nevyhnutnými faktormi rovnováhy motocykla.
Z fyzikálneho hľadiska
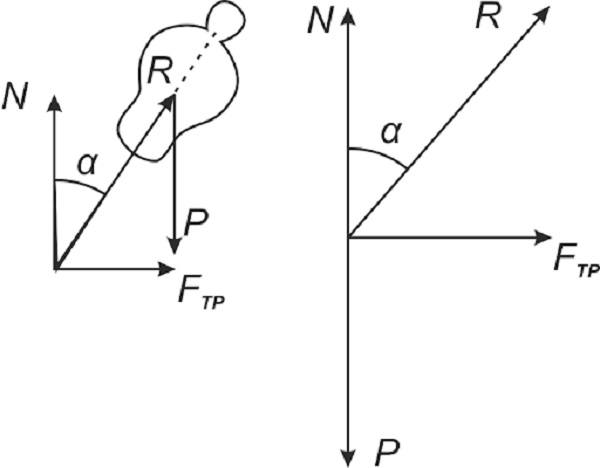
Vedci identifikovali vzor, ktorý udržiava stabilitu dvojkolesových vozidiel. Predná vidlica je v centre pozornosti. Toto usporiadanie zahŕňa sklonenie osi riadidiel vzhľadom na zem. Bod križovania sa nachádza pred čiarou dotyku kolesa bicykla s vozovkou. Ak sa uhol rumpálu odchýli od nastavenej hodnoty, vytvorí sa reakčná sila, ktorá dopravník vráti do správnej polohy. Takto samotný bicykel pomáha udržiavať rovnováhu.
Aby jazdec mohol zatočiť, musí zmeniť ťažisko. Napríklad, keď je bicykel naklonený doprava, predná náprava je tiež naklonená doprava a koleso, ktoré sa otáča v smere hodinových ručičiek (pri pohľade zdola), čiastočne prenáša reaktívny krútiaci moment na riadiacu jednotku. Odstredivá sila má tendenciu otáčať volantom doprava. Pri odbočovaní sa cyklista nakláňa doľava, čím odkloní bicykel a kolesá doprava.
Druhým faktorom, ktorý sa využíva pri stabilite vozidla, je zvýšenie rýchlosti pri spomaľovaní a zatáčaní. Stabilizačný účinok vracia kolesá do správnej polohy a zabraňuje prevráteniu bicykla. Skúsený cyklista používa ruky na montážnych bodoch na riadenie 2-3 mm do cesty.
Gyroskopický efekt
Teória rovnováhy je založená na dobre známom fyzikálnom jave, ktorý sa používa vo vesmíre, letectve a námornej navigácii. Vlastnosť rotujúceho objektu udržiavať smer pohybu sa nazýva gyroskopická sila. Táto činnosť sa prejavuje pri jazde na bicykli v náklone. Pokiaľ sa kolesá otáčajú, vozidlo drží rovnováhu a nikdy sa neprevráti. Napríklad detský vrtuľník „funguje“ len vtedy, keď sa točí. Na overenie hypotézy vytvorili fyzici špeciálnu konštrukciu bicykla. Vpredu bolo nainštalované ďalšie koleso, ktoré sa nedotýkalo zeme a otáčalo sa opačným smerom. Výsledok experimentu vedcov prekvapil. Bicykel sa dokonale pohyboval a nespadol bez gyroskopu.
Po potvrdení hlavných faktorov, ktoré ovplyvňujú stabilitu dvojkolesového vozidla v pohybe, vedci stále diskutujú o nových verziách.
Zaujímavosti
V.A. Jakubovič
- Matematickú teóriu vysvetľujúcu stabilitu bicykla v pohybe predložil doktor vied V. A. Jakubovič. Vedec vysvetlil, prečo ešte nikdy nebol vytvorený autonómny robot ovládajúci bicykel. Informácie o mechanických cyklistoch, ktoré kolovali na internete, sa ukázali ako falošné. Bližší pohľad na kybernetika odhalil niekoľko trikov. Vynálezcovia pripevnili závažia, aby zvýšili stabilitu konštrukcie, znížili ťažisko a zrýchlili jazdný bicykel na vysokú rýchlosť.
Odporcovia vedca dokazujú opak. Robot sa učí veľmi rýchlo. Dôvodom je relatívna jednoduchosť úloh: musíte sa len naučiť udržať rovnováhu. Má schopnosť, ktorú ľudia nemajú: reaguje okamžite a „šklbne“ volantom 5-krát za sekundu.
- Bicykel bez jazdca sa dokáže automaticky riadiť, aby sa neprevrátil,“ tvrdia americkí vedci. Vďaka linearizovaným výpočtom stability výskumníci navrhli bicykel s ďalšími kolesami otáčajúcimi sa v opačnom smere a s negatívnym postojom riadidiel.
- Názor sa líši od hypotéz fyzikov. Zdroje energie na bicykli sú v hlave jazdca. Ľudský mozog tvrdo pracuje na tom, aby nás ochránil pred pádom. Cyklistu drží v rovnováhe podvedomie.
Záver
Dôkazy potvrdzujú význam gyroskopu a koliesok pri udržiavaní stability bicykla počas jazdy. Neexistuje však jasné vysvetlenie, prečo sa bicykel pri jazde neprevráti. Môže existovať ďalšia sila, ktorej pochopenie je dočasne mimo súčasných znalostí.






Napriek tomu si myslím, že bicykel pri jazde nespadne, pretože jazdec udrží rovnováhu a koriguje ju otočením riadidiel v smere pádu. Účinok gyroskopického krútiaceho momentu na koleso pri jazde je nepravdepodobný, rýchlosť kolesa a hmotnosť kolesa nie sú dostatočne veľké na vytvorenie reaktívneho krútiaceho momentu.
Experiment s riadením nepotvrdil, že jazdec drží rovnováhu. Ak na bicykel bez jazdca silno zatlačíte, bude jazdiť a neprevráti sa, aj keď sa zaseknú riadidlá.